Die Motorkonstante
Entscheidende Parameter zur Beschreibung eines Elektromotors sind
a) die Drehzahl bei angelegter Spannung und
b) das Moment in Abhängigkeit vom fließenden Strom.
Es ist dabei gar nicht auf den ersten Blick zu erkennen, dass beide Beziehungen auf der gleichen Motorkonstanten beruhen. Besonders auffällig ist auch, das die Motorkonstante bei allen elektromagnetischen Motoren in gleicher Weise auftritt. Sie soll hier beim Gleichstrommotor mit eisenlosen Läufer näher betrachtet werden.
Beispiel Gleichstrommotor
Im Gleichstrommotor im Bild 1 sind Permanentmagnete ringförmig um einen zylindrischen Anker aus Weicheisen angeordnet. Die Magnete sind abwechselnd mit Nordpol nach innen und nach außen angeordnet. Die magnetischen Feldlinien laufen vom einem grünen Nordpol durch den Spalt zum grauen Anker in der Mitte und treten nach einem Achtel des Umfangs wieder in den benachbarten blauen Südpol aus. Sie durchlaufen dann den Permanentmagneten nach außen und kehren über das weichmagnetische Gehäuse wieder zum Anfangspunkt der Betrachtung zurück und sind damit geschlossene Linien, die den Motorspalt zweimal durchlaufen (von grün nach grau und von grau nach blau).

Bild 1: Gleichstrommotor mit eisenlosem Anker
Die Leiteranordnung, die rechteckförmig von vorne nach hinten gehend den Spalt durchläuft, führt den Ankerstrom und kehrt wie das Magnetfeld von Pol zu Pol die Richtung um, sodass Kräfte, die durch Strom und Magnetfeld bedingt sind alle in die gleiche Richtung wirken. Wie bei Gleichstrommotoren üblich wird der Strom in der Richtung umgekehrt, wenn der Leiter den Pol passiert hat.
Die Anordnung mit beweglichem stromdurchflossenen Anker entspricht der klassischen Form des Gleichstrommotors, mit der Ausnahme daß die Leiteranordnung nicht auf dem Eisenkern der Ankers befestigt ist, sondern als Topfanker von einer Seite in den Spalt gesteckt ist. Das ist mit der einseitigen Lagerung etwas aufwändiger hat aber den Vorteil, daß der Eisenteil des Ankers nicht mitrotiert und damit nicht zum Trägheitsmoment beiträgt und auch nicht ummagnetisiert wird und damit auch keine Verluste verursacht.
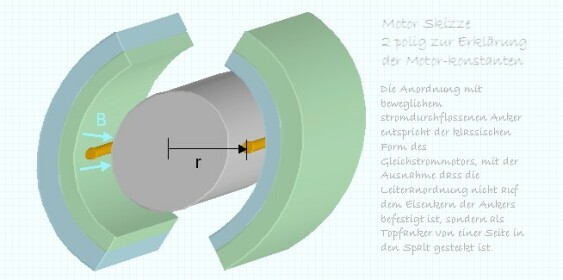
Bild 2: Gleichstrommotor mit 2 Polen
Der Motor ist in Bild 2 noch einmal in 2poliger Anordnung gezeigt.
Bild 3 zeigt in ebener Anordnung zwei aufeinanderfolgende Pole mit der Leiterschleife für die nun für einen Strompfad in einer Richtung die induzierte Spannung und das Moment berechnet wird. Für die Werte des gesamten Motors sind die Spannungen und die Momente entsprechend der Zusammenschaltung zu addieren.
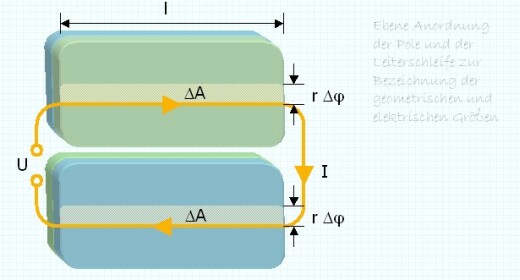
Bild 3: Polanordnung mit Leiterschleife zur Bezeichnung der Größen
Verschiebt man die Leiterschleife in Bild 3 nach unten dann ändert sich der umschlossene Mangetfluß. Der umschlossene Anteil der grünen Fläche sinkt und gleichzeitig steigt auch der umschlossene Anteil der blauen Fläche. Da die Magnetfelder gegensätzlich gerichtet sind haben die induzierten Spannungen gleiches Vorzeichen. Die gesamte Flußänderung der Ankerspule ist damit mit der Polzahl p zu mulitiplizieren. Die induzierte Spannung ergibt sich dann aus der gesamten Flußänderung über alle Pole multipliziert mit der Windungszahl n der Ankerspule (1).
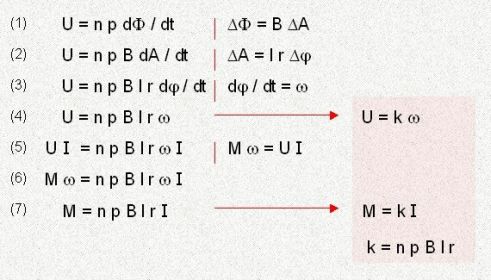
Bild 4: Berechnung der Motorkonstanten
Bei konstanter Flußdichte ist es die Fläche die sich ändert (2). Die Änderung der Fläche ist in (3) näher beschrieben: Bei konstanter Länge l des Leiters ändert sich die Fläche um die Länge mal dem Umfangsabschnitt (Radius mal Winkel).
(4) beschreibt schließlich die Winkeländerung über der Zeit als Winkelgeschwindigkeit. Man kommt so zu einer Beziehung zwischen induzierter Spannung und Winkelgeschwindigkeit, die als Faktor nur Konstruktionsgrößen des Motors enthält. Dieser Faktor wird deshalb auch Motorkonstante genannt.
Fließt bei der Bewegung und beim induzieren der Spannung auch ein Strom, dann fließt am Motoranschluß die elektrische Leistung U mal I. Im verlustlosen Fall ist diese Leistung gerade gleich dem Produkt aus Drehmoment und Drehzahl. Multipliziert man also (5) mit dem Strom I und setzt die elektrische Leistung gleich der mechanischen Leistung, dann erhält man (6) und beim Eliminieren der Drehzahl erhält man die Beziehung (7) zwischen Strom und Drehmoment. Sie ist ebenso ein konstanter Faktor, nämlich gerade die Motorkonstante die schon als Faktor zwischen Spannung und Drehzahl aufgetreten ist.
Entscheidend ist hierbei nicht, die Windungszahl anhand der Flußdichte berechnen zu können, sondern eine Verbindung zwischen den charakteristischen Beziehungen
a) Drehzahl bei angelegter Spannung und
b) Moment in Abhängigkeit vom fließenden Strom
herzustellen.
Manfred








 Zitieren
Zitieren



Lesezeichen