




 Zitieren
ZitierenWie in dem anderen Thread: rb-35
Die Igarashi Motoren (https://www.roboternetz.de/phpBB2/ze...light=igarashi) könnten wirklich auf die Getriebe passen
Die Ritzelgöße von deinen jetzigen Motor kenne ich aber leider nicht (Innendurchmesser).


Danke für die Tipps.
Mit der Gewschwindigkeit hast du recht, die lässt etwas zu wünschen übrig.
Aber ich hatte keine andere möglichkeit, um sicher zu gehen habe ich
i=200 genommen, da die Drehmomentangaben sehr ungenau sind...
Die Kraft wird aber auch benötigt, der Bot hat gerade mal 1/3 des Endgewichts.
Um den Bot also schneller zu machen, bräuchte ich andere Motoren, heisst:
-doppelt so teuer
-mehr Stromverbrauch
-andere ansteurung,
-Akku schneller leer
-andere kupplung
Aber früher oder später werde ich mir wohl andere Motoren rein bauen.
Die umbauarbeiten halten sich dabei aber in Grenzen.
Die Höchstgeschwindigkeit dürfte das nicht gewesen sein,
da der 7,2V Akku fast leer war, ich denke da ist das doppelte möglich.
Dadurch das er so langsam fährt, kann er aber auch seine Umgebung
besser wahrnehmen, heisst nahtloserer Übergang beim ausweichen usw..
Wie in dem anderen Thread: rb-35
Die Igarashi Motoren (https://www.roboternetz.de/phpBB2/ze...light=igarashi) könnten wirklich auf die Getriebe passen
Die Ritzelgöße von deinen jetzigen Motor kenne ich aber leider nicht (Innendurchmesser).
Danke für den Tipp Reeper, werde aber erstmal die RB-35 drin lassen.
Also zurück zu meiner Einkaufsliste, muss spät. Dienstag bestellen.
Währe nett wenn ihr mal drüber schaun könnt und mir weiter Tipps gebt.
von Pollin:
Akkus 270425 6V 4Ah 2x in Reihe
Ladegerät 350 172 Automatik-Lader AL 600
LCD Modul 120232
Dann brauch ich noch Sensoren, bisher hab ich nur einen Entfernungssensor Sharp GP2D12, der auf einem Servo montiert werden soll.
Meint ihr der reicht an IR Sensoren?
Ultraschallsensoren müssen wohl noch her, weiss noch nicht wieviele und welche, taugt denn der von conrad 114456 - 62 was?
Ansonsten habe ich mir noch folgendes an Kleinteilen überlegt
-Sensoren-Temperatur, feuchtigkeit, licht/helligkeit
-Folientastatur o.ä.
-Atmels 8 oder 16
-Stecker
-Schraubklemmen
-Stiftleisten
-Lochraster Platinen
Habe vor alles möglichst modular aufzubauen und auch zusatzboards...
Brauch ich sonst noch was, z.b. für das LCD Modul, oder Mosfets?
Ein paar Elektronikteile hab ich noch hier, aus Altgeräten ausgeschlachtet und teils neu,
wie Transistoren, Dioden, Wiederstande, Elkos, Potis.
Ach und könnt ihr mir noch ein günstiges Funkmodul empfehlen,
danke schonmal.
Zum Conrad US-Abstandswarner:
zu teuer
billiger gibt es den bei Pollin (Best.Nr. 580 014)
Die sind aber wirklich nur zur Abstandswarnung zu gebrauchen, also keine Entfernungsmessung möglich.
Zur Tastatur:
Die kannst du dir billig selber aus Drucktastern, Taschenrechnern oder anderen Gegenständen basteln(Pollin: Best.Nr. 420 403 - Tastatur SAMWELL 702772-8 ; Best.Nr. 420 480 - Tastatur BB-5).
Diese kannst du einfach mit einem adc-Port "auslesen" (über Spannungsteiler https://www.roboternetz.de/phpBB2/ze...151&highlight=
Helligkeitssensoren Sensoren:
Es gibt bei Pollin so viele schöne Sortimente, zB.: Foto-Widerstände (Best.Nr. 800 223)
Zum Akku:
Für meine neue Plattform (RT2) benutze ich 2 parallel geschaltete Akkuschrauber Akku's. Ein Akku besteht aus 10 Zellen und hat eine Kapazität von 12000mAh und eine Spannung von 12V, parallel ergibt dies 24000mAh bei insgesamt nur 750g.
Ein Akkuschrauber (brauchte damals die Getriebe) hat 9,99 inkl. Ladeelektronik gekostet.
Dies wäre evtl. auch für dich eine Alternative (Die Zellen habe ich einfach nebeneinander angeordnet, so habe ich quasi ein handlichen Riegel und kann diese Kappe vom Akku-Gehäuse trotzdem verwenden - könnte ihn direkt in das Gegenstück vom Ladegerät stecken).
Danke für die Tipps Reeper, habe mitlerweile bei Pollin bestellt gehabt,
am Anfang werd ich jedoch erstmal Blaiakkus verwenden.
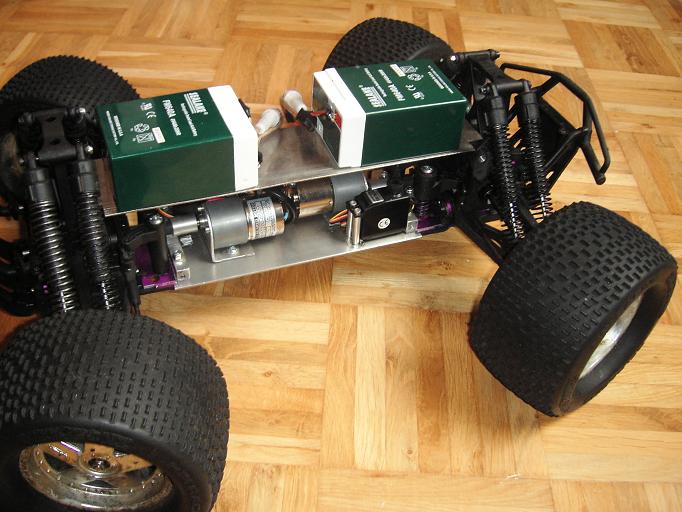
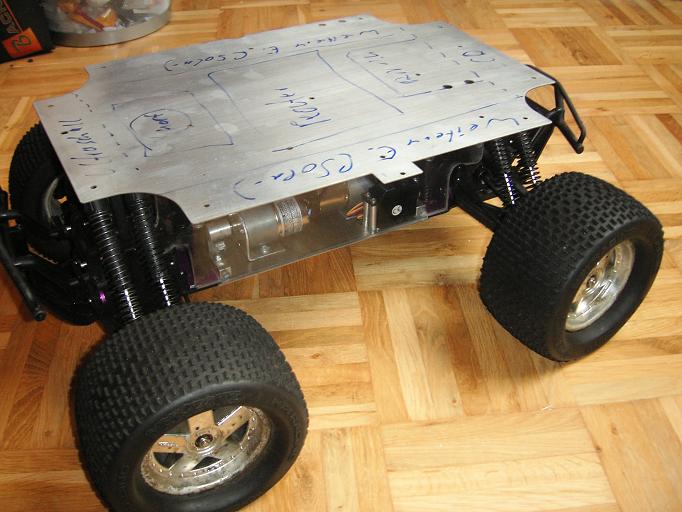
Hier jetzt nochmal ein kleines Update



Sieht echt gut und respektvoll aus!
Die Savage Modelle sind wirklich groß .
So, nach langer Pause, habe ich auch mal wieder Zeit gefunden
und Lust gehabt an meinem Projekt ein wenig weiter zu machen.
Ich habe gestern mal die ersten Lenkversuche unternommen,
leider war das Ergebniss nicht so gut wie ich es mir erhofft habe.
Die Servos sind zu schwach und müssen anders befestigt werden,
der Antrieb ist mir zu laut, die Lenkgeometrie ist Mist usw...
Aber immerhin fährt er schonmal, mal sehen wie es weiter geht.
Hier ein link zum Video
http://www.videotube.de/watch/19514
Schön mal wieder was von deinem Savy zu hören
Die Lenkung macht doch einen ganz passablen Eindruck...
Evtl. sind Modellbaumotoren mit richtig viel U/min das Richtige für den Bot.
Die müssten nur den richtigen Wellendurchmesser haben, damit du die jetzigen Ritzel draufmachen kannst und so das Getriebe ebenfalls nutzen könntest (muss nur die Übertragung des Drehmomentes durch die Konstruktion verbessert werden). Als Batterie zB. Akkuschrauber-Akku's und los geht's
Gruß
Stefan
Schön das jemand intresse hat.
Die Lenkung ist mir ein wenig zu schwach.
Ich habe das Fahrgestell gestern mal ein wenig beladen,
schon bei wenigen kg funktionierte die Lenkung nicht mehr richtig.
Der Lenkeinschlag der äusseren Räder ist auch zu gross (wie auf Seite 1 besprochen),
sodass die Räder seitlich weggedrückt werden.
Im Zimmer, bzw. auf glattem Bodem macht das nix,
aber im Garten gabs da schon Schwierigkeiten.
Was die Gewschwindigkeit angeht, ist er wirklich ein wenig langsam,
aber es soll ja ein Bot werden.
Mal sehen was das bringt die Spannung noch ein wenig zu erhöhen.
Die Kupplung ist auch zu elastisch, merkt man richtig wenn er über ein
Hinderniss fährt, wie auf dem video der Türstopper.
Die Motoren sind mir bei höherer Belastung ein wenig zu laut
und die Einzelteile passen nicht so genau,
wie ich das gerne hätte...(nur Probleme)
Ist halt alles nicht so gut durchdacht und mehr drauf losgebaut.
Naja sehen wir ihn mehr als Prototyp an, wenn er irrgentwann
mal fertig ist, wird er neu gebaut.
Moin moin,Zitat von Tuxy
Erst einmal, interessiantes Teil!.
Zu den Lenkausschlägen nur eine Überlegung, ob das machbar ist?
Wenn man jeweils die Räder einer Seite an einem "Digitalen" Servo gegensinnig ansteuert, kann man den Lenkeinschlag (außen/innen) getrennt mittels Steuerrechner nach Wunsch einstellen.
Gruß Richard
 Berechtigungen
Berechtigungen

Lesezeichen