-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

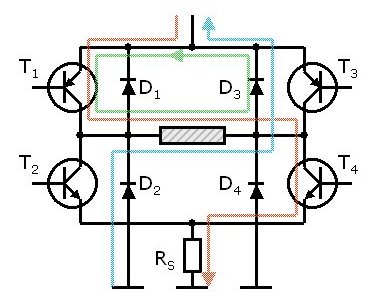
Zur Ansteuerung des Motors in der H-Brücke mit PWM ganz allgemein:
Oben im Schaltbild der Brücke, beispielsweise für den linken Motor erfolgt die Richtungsansteuerung des Motors über die Signale a und b.
Das Signal das auf 0 ist steuert den oberen Brückentransistor an, b=0 für T1 und a=0 für T3 und sperrt über das und Gatter auch gleich den unteren Transistor damit die Spannungsquelle nicht kurzgeschlossen wird.
Wenn dann eine PWM Ansteuerung über c dazukommt dann wird eine Spannung an den Motor gelegt. Für b = 0 (und a= 1) wird der Transistor T4 über c mit PWM angesteuert und der Strom fließt von d nach e durch den Motor.
Solange der Transistor T4 angesteuert ist fließt der Strom
von Vcc über T1 Motor d-e und T4 nach GND.
Ist der Transistor T4 gesperrt dann fließt der Strom
von Vcc über T1 Motor d-e und die Freilaufdiode D3 nach Vcc zurück.
Die Ansteuerung erfolgt also im Chopper-Betrieb mit slow decay. Siehe auch: https://www.roboternetz.de/wissen/in...hopper_Betrieb
Dort ist es der Wechsel zwischen dem roten Strompfad in der On Phase des PWM und dem grünen Strompfad in der Off Phase des PWM. Es ist in der Darstellung auch gezeigt, dass es eine Alternative fast decay gibt.
Für Motoren mit kleinen Induktivitäten wie hier beim ASURO ist der slow decay mode der geeignete. (Um das Abklingen des Motorstroms weiter zu verzögern könnte man allenfalls noch die jeweilige Freilaufdiode in der Abschaltphase des PWM kurzschließen. )
Es sollte bei einer kleinen Induktivität, die zu Stromlücken führt, die PWM Frequenz erhöht werden.
Manfred
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen