-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

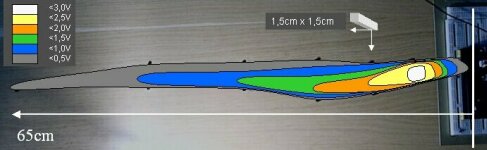
Der Sharp hat ein schmales Blickfeld. Er kann allerdings den Abstand messen.
Wenn man ihn möglichst quer vor dem Fahrzeug einsetzt, dann kann er fast die ganze Breite überblicken und auch noch die Stelle angeben, an der ein Hindernis ist.
So ganz ideal geht es mit einem Sensor sicher nicht, eher schon mit zweien, die X-förmig das Feld erfassen.
Manfred
https://www.roboternetz.de/phpBB2/vi...?p=15756#15756
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen