




 Zitieren
ZitierenWas war denn die Begründung dafür, dass die Sensoren nicht zur Kollisionsvermeidung eingesetzt werden können.
(Kollisionsschutz im Sinne von Kollisionsvermeidung, ansonsten Schutz bei Kollision wäre eine Stoßstange)

 Werbung
Werbung

Hallo zusammen
Für meine Robotikaufgabe für die Schule sind die SHARP GP2D12 Infrarotsensoren gegeben. Nun habe ich mich informiert und herausgefunden, dass sie als Kollisionsschutz nicht so geeignet sind. Meine Frage ist nun: Wie weit sind sie nicht geeignet? Wenn ich diese als Kollisionsschutz gebrauchen will (ich habe zwei solcher Sensoren auf dem Vorderteil meines Fahrzeugs befestigt), auf was muss ich achten?
Vielen Dank für eure Hilfe
Grüsse Manfred
Was war denn die Begründung dafür, dass die Sensoren nicht zur Kollisionsvermeidung eingesetzt werden können.
(Kollisionsschutz im Sinne von Kollisionsvermeidung, ansonsten Schutz bei Kollision wäre eine Stoßstange)
Hallo Ogni
Hier das zitat:
"Oft werden selbst in kleinen Roboter-Projekten mehrere dieser Sensoren
genutzt da sie nur einen äußerst engen Erfassungsbereich haben. Sie eignen sich daher sehr gut zur Vermessung einer Umgebung, insbesondere dann wenn Sie drehbar auf einem Servo montiert werden. Als Kollisionsschutz sind sie wegen dem engen Winkel nur bedingt geeignet, zu diesem Zweck eignen sich zum Beispiel Ultraschallsensoren besser."
Was bedeutet das?
Danke für die Hilfe
Im Übertragenen Sinne:
Die Sensoren verhalten sich wie ein Pferd mit Scheuklappen. Sie können nur sehen, was direkt vor ihnen ist und haben damit ein eingeschränktes Sichtfeld. US Sensoren haben die Scheuklappen nicht (oder nicht so starkt) und daher ein weiteres Sichtfeld.
Um Kollisionen zu vermeiden ist ein weites Sichtfeld besser, da man mehr von der Umgebung erfasst, so dass man besser sieht, was vor _und_ neben einem ist.
Aha .. Danke
Kannst du mir so einen Sensor mit weiterem Sichtfeld empfehlen? (Einfach im Aufbau und zum Inbetriebnehmen)
Danke..

Das Ganze zwickt sich aber. Mit breiterem Feld erkennst du eher DASS da ein Hindernis ist, mit einem kleinerem Feld findest du aber besser einen Weg vorbei. Man kann ja nicht immer einfach umdrehen.
Offensichtlich braucht man eher beides.
mfg robert
Wer glaubt zu wissen, muß wissen, er glaubt.
Empfehlen kann ich Dir leider keinen, dazu habe ich mit den Teilen zu wenig Erfahrung, allerdings helfen Dir die Datenblätter meistens weiter. Evtl. findest Du auch schon Informationen im wiki.
Vielen Dank für eure Hilfe !!
gruss manni

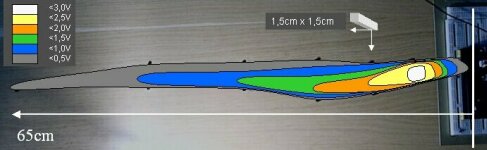
Der Sharp hat ein schmales Blickfeld. Er kann allerdings den Abstand messen.
Wenn man ihn möglichst quer vor dem Fahrzeug einsetzt, dann kann er fast die ganze Breite überblicken und auch noch die Stelle angeben, an der ein Hindernis ist.
So ganz ideal geht es mit einem Sensor sicher nicht, eher schon mit zweien, die X-förmig das Feld erfassen.
Manfred
https://www.roboternetz.de/phpBB2/vi...?p=15756#15756
 Berechtigungen
Berechtigungen
Lesezeichen