-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

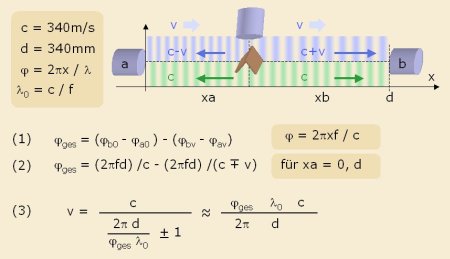
Die Anordnung zur Windmessung ist die gleiche nur wird hier bei der festen Frequenz von 40kHz eine Luftbewegung der Bewegung des Schalls überlagert. Die Windgeschwindigkeit v soll hier ja aus der Änderung der Phase gegenüber dem Zustand v = 0 bestimmt werden.
Es gibt dazu wieder die Phasenänderung (phi ges) als Änderung der Phasendifferenz zwischen den beiden Zuständen mit und ohne Wind. Die Position des Senders, xa war nicht angegeben. Es werden die beiden Extremwerte xa = 0 und xa = d betrachtet um zu zeigen, dass der Unterschied gering bleibt. Im Ansatz kommt er durch c+-v zu Ausdruck und im Ergebnis durch +-1 im Nenner die für kleine Geschwindigkeiten vernachlässigt werden kann. Die Linearität der Messung ist am besten für xa = d/2.
Im Ergebnis (3) steht, dass die Windgeschwindigkeit v näherungsweise der Schallgeschwindigkeit c mit zwei Faktoren entspricht. Ein Faktor ist Phi ges durch 2pi, also der normierte Winkel, der andere Faktor ist Lambda 0 durch d, also die Anzahl der Wellenlängen pro Länge der Messstrecke.
Im Beispiel hat man eine Auslenkung von Phi /2pi = 0,2 und eine Messtrecke von 40 Wellenlängen, also ist die Windgeschwindigkeit c * 0,2 / 40, also c /200 oder 1,7m/s.
v = 1,7m/s
Ab der 5-fachen Windgeschwindigkeit also ab 8,5 m/s wird das Ergebnis mit dieser Anordnung mehrdeutig. Man könnte dann einerseits die Messstrecke verkleinern, um aber nicht an Auflösung und damit an Messgenauigkeit zu verlieren kann man im nächsten Schritt die beiden Verfahren kombinieren. Man generiert also durch Variation der Messfrequenz eine große synthetische Wellenlänge für die grobe Bestimmung der Windgeschwindigkeit. Die präzise Bestimmung führt man dann im Bereich der kleinen Wellenlänge durch der für sich allein mehrdeutig ist.
Es ist schon ein großer Vorteil, wenn man mit kombinierten Messverfahren einerseits einen Überblick und andererseits auch eine hohe Präzision erreichen kann, besonders wenn sich die Komplexität dabei auf die Steuerung beschränkt.
Manfred
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








Lesezeichen