-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

Momente der Durchflutung
Momente der Durchflutung
Für dieses Posting (5000) hatte ich mir ein besonderes Thema vorgenommen, es lautet wie gesagt Momente der Durchflutung und ist hier im Forum schon in einigen Aspekten immer wieder angesprochen worden. Es soll eine thermische, eine statische und eine dynamische Analyse umfassen und einfache (zum Teil in Näherungen vereinfachte) Antworten auf Fragen zu diesem für Schrittmotoren wichtigen Thema geben.
Erste Messungen zum ersten Teil, der thermischen Analyse, sind fast abgeschlossen und werden dann auch gleich dargestellt. Erste Messergebnisse zur statischen Analyse liegen auch schon vor.
Motivation zur Analyse von Schrittmotoren
Es gibt Gelegenheiten, bei denen kommt man zu einem Schrittmotor ohne die dazugehörigen Daten. Bei Ausbauten aus Geräten, für die diese Motoren exklusiv hergestellt wurden, gibt es manchmal nur kryptische Typenbezeichnungen, aber kein öffentliches Datenblatt. Die Motoren selbst sind aber meist von erfahrenen Herstellern optimal entwickelt und gefertigt.
Wie kommt man dann zu den relevanten Daten und welche sind das überhaupt?
Der erste wichtige Wert ist sicher der Strom, der den Motor auf Dauer nicht überhitzt.
Dann ist es der Stromwert, der dem Motor ein ausreichendes Moment verleiht ohne die magnetische Durchflutung unnötig weit in die Sättigung zu treiben (siehe Titel).
Weiter ist Schrittfrequenz interessant, bis zu der der Motor sein Moment liefern kann.
Die Messung und die Abschätzung dieser Daten soll hier betrachtet werden.
Manfred
-
Super-Moderator
Lebende Robotik Legende
Thermische Grenze für den Strom
Zunächst einmal soll der Strom wegen der Erwärmung nicht zu groß werden. Das Problem ist eine Beschädigung der Wicklungsisolation oberhalb von 130°C. Häufig wird angegeben, dass Schrittmotoren auch an der Oberfläche recht heiß werden. Das sind dann so um die 60°C bis 80°C. Wie heiß wird es dann drinnen sein an der empfindlichsten Stelle, im Hot Spot?
Die Lösung der messtechnischen Aufgabe ist erstaunlich einfach: Man mißt ohne den Motor zu öffnen die Temperatur direkt in der Wicklung. Kupfer hat einen Ohmschen Widerstand, der sich mit der Temperatur um 0,0039 pro °C ändert. Legt man die Wicklungen an eine Spannungsquelle und beobachtet, dass sich der Strom ab dem Einschalten um 10% absenkt, dann liegt eine Erwärmung um 25°C vor. Für eine genaue Messung muss man abwarten, bis sich die Wärme über den Motor ausgebreitet hat.
Die Beispielmessung an einem 250g schweren Schrittmotor hat folgendes ergeben:
Man hat es bei der Erwärmung mit zwei Zeitkonstanten zu tun. Eine relativ kurze für die Spule, die ja auch elektrisch gut isoliert ist von ca. 2min und eine nachgelagerte für den Motor von ca. 20min. Die Wärmekapazität des Motors liegt bei 460Ws/kg°C * 0,25kg, also bei 115 Ws/°C. Mit einer Erwärmung von 32°C bei 3W Verlustleistung hat der Motor einen Wärmewiderstand von 11°C/W, was zu der Zeitkonstanten von ca. 20min führt. Um damit die Endtemperatur zu ermitteln, sollte man schon über 2 bis 3 Zeitkonstanten messen.
Im Bild ist der Temperaturverlauf der Erwärmung über Umgebungstemperatur bei Speisung mit konstanter Spannung über der Zeit im Minuten dargestellt. Die Temperaturmessung ist aus einer Strommessung (mit grober Quantisierung) mit Hilfe der Temperaturabhängigkeit des Wicklungswiderstands abgeleitet. Die Messkurve steigt zunächst steiler an, bzw steigt weiter, als die zum Vergleich eingezeichneten e-Funktionen was durch den ungleichmäßigen Wärmewiderstand des Motors bedingt ist. (Der Leistungsrückgang durch den steigenden Widerstand, um 10% während der Erwärmung, hat einen geringeren Einfluß auf den Kurvenverlauf.)
Man erkennt den steilen Kurvenverlauf am Anfang, mit der Zeitkonstante der Wicklung und den späteren langsmaeren Verlauf, mit der Wärmekapazität des gesamten Motors. Er stand bei der Messung unmontiert auf einer Holplatte.
Ergebnis
Bei einer ausgewogenen thermischen und magnetischen Dimensionierung des Motors ist man mit der Messung des Stroms für ca. 25°C Erwärmung schon im Bereich des Nennstroms und hat eine Überprüfung der Erwärmung des Hot Spot mitten im Motor durchgeführt.
Geht man bis zur doppelten Erwärmung, die noch vertretbar sein könnte, dann darf man bei gleichem Wärmewiderstand den Strom nur um 1,4 erhöhen. Wegen der bereits eintretenden magnetischen Sättigung wird sich dabei das Moment nur sehr viel weniger erhöhen. Um wie viel, das wird sich bei der Messung der magnetischen Kennlinie mit ihrer Abflachung bei hoher Feldstärke zeigen.
Manfred
-
Erfahrener Benutzer
Roboter Experte
Hi Manf
Sehr interessantes Thema.
Bin schon gespannt was da noch folgen wird.
Gratuliere zum 5000 post.
LG
Rubi
-
Super-Moderator
Lebende Robotik Legende
Danke für die Gratulation zum 5000., ich war auch gespannt, wie die Messung ausgeht, ich bin nur noch am Formulieren.
Bestimmung der statischen Momente
Es ist eigentlich nur ein Wert, mit dem das statische Moment des Schrittmotors angegeben wird, das Haltemoment Mh bei Nennstrom, dieses wird zunächst erläutert.
Erläuterung zum Haltemoment
Zur Beschreibung wird von einem bipolaren 2 Phasen Schrittmotor mit 200 Schritten pro Umdrehung ausgegangen, also mit 1,8° pro Schritt. Er hat eine Schrittfolge von 4 Schritten pro Periode, die Periode ist damit 7,2° lang.
Der Momentverlauf über der Periode ist sinusförmig. Das gilt für jede der beiden Phasen, eine Phase folgt damit der Sinusfunktion die andere der Cosinunsfunktion, die rote und die blaue Kurve im Bild. Sie haben die gleiche Amplitude Mh1 = Mh2.
Als Summe der erhält man ein Moment mit mittlerer Phase mit der wurzel(2)-fachen Amplitude. Dieser Amplitudenwert ist Mh, graue Kurve. Der Momentverlauf ist damit durch den Amplitudenwert, nämlich dem Haltemoment, und der Periodenlänge (7,2°) bestimmt.
Als weitere Größe ist durch die Sinusfunktion auch die Steigung D1 im Nullpunkt bestimmt, gelbe Kurve. Die Steigung gibt das Moment pro Winkel an und hat den Wert
D1 = Mh1 * Pi/2 * (180°/Pi) / 1,8°. Mit dem Faktor (180°/Pi) wird der Winkel auf Pi normiert.
D1 = Mh1 * 50.
Hiermit hat man die Möglichkeit zur Bestimmung des Haltemomentes eine der Größen Mh1 oder D1 (bzw die entsprechende Größe für zwei Phasenströme Mh oder D) zu messen.
Messung des Haltemoments
Wenn man eine zeitlang versucht hat, den Amplitudenwert des Momentes mit einer Federwaage oder Schleppzeigerfederwaage oder einer Küchenwaage zu messen und für aufsteigende und abfallende Stromwerte daraus die Motorkonstante aufzunehmen, kommt man darauf, dass der andere Weg, der über die Steigung, recht präzise Messungen zulässt.
Die Steigung der Momentfunktion D1 ist nämlich das Moment geteilt durch den Winkel, so wie eine Drehfederkonstante, deshalb auch der Buchstabe. Man hat mit dem Trägheitsmoment J des Rotors und der Drehfederkonstanten ein schwingendes System, das bei konstantem D1, also für kleine Winkel, eine Schwingung mit der Frequenz f und der Periodendauer T ausführt:
T = 2 Pi Wurzel( J / D1)
Damit gilt:
D1 = 4 * Pi^2 * f^2 * J.
So könnte man bei bekanntem Trägheitsmoment J mit der kontinuierlichen Messung der Resonanzfrequenz in Abhängigkeit vom Phasenstrom die Steigung D1 und damit das Haltemoment bestimmen. Es geht nun also noch um die Erzeugung der Resonanz und um die Bestimmung des Trägheitsmoments, dann wird es gleich wieder übersichtlicher.
Manfred
-
Super-Moderator
Lebende Robotik Legende
Bei der Erzeugung des Haltemoments und der Resonanz, können die Aufgaben gut auf die beiden Phasenspulen verteilt werden, wie in der Schaltung im folgenden Bild rechts dargestellt. Die eine führt den Gleichstrom für das zu messende Moment. Der Rotorpol wird damit von ihr angezogen es stellt sich damit gerade der Nullpunkt für die Sinusfunktion ein. Die andere Spule wird an eine Wechselspannung mit einstellbarer Frequenz angeschlossen. Die Resonanz kann nun am besten nach Phasenverschiebung zwischen Anregung und mechanischer Schwingung ermittelt werden. Optimal ist dafür eine geteilte Messspule, oder eine mit Mittelanzapfung in deren eine Hälfte die Anregung eingespeist wird und in deren anderer Hälfte die Phase der mechanischen Schwingung gemessen wird.
Bei der Anzeige der Anregung und der induzierten Spannung im x-y Betrieb eines Oszilloskops ließ sich die Frequenz für den Phasenabgleich leicht auf 0,1% genau einstellen. Man kann auch sehr gut am x-y Bild erkennen, ob die Amplitude ausreichend klein und die Schwingung harmonisch ist (im Test bei 0,5V).
Für die Bestimmung (oder besser für die Elimination) des Trägheitsmoments wird die Kurve zweimal aufgenommen, einmal mit dem Schrittmotor alleine und einmal zusammen mit einem Testkörper von bekanntem Trägheitsmoment, das etwa im Bereich des Trägheitsmoments des Rotors liegt. Im vorliegenden Fall war der Testkörper ein mittleres bis kleines Zahnkranzbohrfutter, Bild oben links, das sich leicht auf der Welle des Motors befestigen lässt und das nach gesonderter Messung ein Trägheitsmoment von 10µkgm² hat. Die Messung des Testkörpers wurde wie hier beschrieben durchgeführt.
https://www.roboternetz.de/phpBB2/viewtopic.php?t=12793
Der Rotor des Schrittmotors hat, wie sich herausstellte, ein Trägheitsmoment von 2,7µkgm².
Das Ergebnis ist eine Kurve des Moments (bzw. der proportionalen Richtgröße D1) in Abhängigkeit vom Strom, die recht aufschlußreich für das statische Verhalten des Motors ist.
Manfred
-
Super-Moderator
Lebende Robotik Legende
Messergebnis statisches Moment
Die Werte für die Resonanzfrequenz über dem Phasenstrom wurden einmal mit und einmal ohne den zusätzlichen Testkörper aufgenommen. Es wurde dabei jeweils (ausgehend von einer entgegengesetzten Magnetisierung) der Strom ab null in Stufen von 10mA erhöht bis 180-200mA und dann, nach kurzem Erhöhen auf 300mA die Kurve in den gleichen Stufen rückwärts durchlaufen.
Unmittelbar nachvollziehbar ist das Bild oben links, in dem direkt die Frequenzen über dem Strom aufgetragen sind. Die rote Kurve hat die tiefste Frequenz, sie wurde mit größerem Trägheitsmoment und mit ansteigendem Strom aufgenommen. Beim Rückweg auf der gelben Kurve wirkt die Remanenz der Magnetfluss ist stärker und die Frequenz damit höher. Die blaue Kurve ist die Aufnahme der Frequenz bei kleinem Trägheitsmoment und die grüne Kurve ist die dazugehörige Kurve mit abnehmendem Strom.
Quadriert man die Frequenz und multipliziert sie mit 4Pi², dann erhält man D1 / J, die Steigung des Momentes für die eine Phasenspule, geteilt durch das Trägheitsmoment. Die Kurve ist unten links aufgetragen. Es sind unanschaulich hohe Werte, die dem Moment proportional sind. Wenn man die Kurven schon in excel hat, dann ist es am einfachsten die oberen beiden mit dem geschätzten Anker Trägheitsmoment zu multiplizieren und die unteren beiden gleichzeitig mit dem Anker Trägheitsmoment plus dem bekannten Bohrfutter Trägheitsmoment zu multiplizieren. Variiert man dann den Wert für das Anker Trägheitsmoment solange bis die Kurven sich so gut wie möglich decken, dann stimmt der angenommene Wert und die Kurve beschreiben den Verlauf von D1 über dem Strom.
Mit Mh1 = D1 / 50 erhält man das Haltemoment für eine Phasenspule über dem Phasenstrom i, die Kurven im mittleren Bild. Es ist das Haltemoment in Nm über dem Strom in mA. Das Moment ist recht hoch, dafür hat die Spule entsprechend viele Windungen.
Aufgetragen ist hier das Haltemoment (hier speziell für eine Phase), die Größe die bei der Benennung von Schrittmotoren angegeben wird. Die Kurve hat die Form einer üblichen Hysteresekurve für Dynamoblech mit geringer Koerzitivkraft. Die Kurve ist relativ schmal, läuft aber nicht auf den Nullpunkt zu. Das ist durch den permanent magnetisierten Anker bedingt. Mit dem Drehen des Ankers kehrt sich die Remanenz um und die Kurve verläuft im negativen Bereich punktsymmetrisch zum Nullpunkt.
Das zum Antrieb wirksame Moment Mr1 (für eine Phasenspule) beinhaltet nicht den Teil des Haltemoments, der beim Strom null den Anker aufgrund seiner Magnetisierung noch in der Position hält. Mr1 ist der Anteil oberhalb 39mNm. Beim Antrieb kommt der Motor jeweils aus der entgegengesetzten Magnetisierung und damit ist die rote (und blaue) Kurve maßgeblich. Damit hat der Motor beispielsweise ein Antriebsmoment von 100mNm bei 100mA.
Man erkennt, dass Mr1 nicht linear mit dem Strom steigt, sondern mit der Magnetisierungskurve abgeflacht ist. Das zeigt sich auch im Bild oben rechts, in dem Mr1 durch den Strom geteilt aufgetragen ist. Das Moment geteilt durch den Strom ist ja auch die Motorkonstante, die hier eben nicht ganz konstant ist, sondern über dem Strom von 1,4 Nm/A bis 0,7Nm/A abfällt.
Interessant ist dann sicher auch, wie groß die induzierte Spannung über der Winkelgeschwindigkeit ist, wenn der Motor als Generator betrieben wird. Das ist ja auch eine (die) Motorkonstante. Um die gleiche Skala zu verwenden, ist die Winkelgeschwindigkeit waagerecht in Upm aufgetragen und senkrecht die Motorkonstante für die induzierte Spannung in Vs. Es ergibt sich ein relativ konstanter Wert von 0,7Vs (violette Kurve). Die induzierte Spannung ist ja ganz durch die Magnetisierung des Ankers bedingt.
Im Bild unten rechts ist in der roten Kurve das Moment Mr1 über dem Strom aufgetragen. Es ist das für die Drehung wirksame Moment beim Betrieb von jeweils nur einer Phase (Wavedrive). Setzt man die gleiche Leistung für den Zweiphasenbetrieb ein, bei der immer zwei Phasen gleichzeitig angesteuert werden, dann ist der Strom pro Phase auf 0,7 zu reduzieren. Im Zusammenwirken der beiden Phasen erhöht sich das wirksame Moment Mr auf 1,41 * Mr1. Bei der Abflachung der Momentkurve über dem Strom führt das bei gleicher Leistung zu einem erhöhten Moment (schwarze Kurve im Bild unten rechts). Es ist also ein Vergleich der beiden Betriebsarten bei gleicher Leistung. In diesem Beispiel ist der Unterschied recht gering.
Manfred
Stichworte
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 







 Zitieren
Zitieren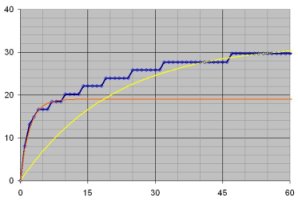
Lesezeichen