




 Zitieren
ZitierenWir werden neben dem Sägezahn aber wohl oft bei beschleunigten Bewegungen mit quadratischen Funktionen konfrontiert sein.
Oder nehmen wir den Sägezahn als Näherung davon und lassen es gut sein ?

 Werbung
Werbung


Faltet man die Sägezahnfunktion mit der Amplitude A und der Frequenz f mit einer Spaltfunktion der Breite D,
dann ergibt sich die Amplitude U.
U = A - A * D * f ...............................für .. 0 < f < 1/D
U = A - A * D * f + 2A * (D-1/f) / D... für 1/D < f < 2/D
Mit dieser Kurve kann man die Amplitudenwerte für weitere Anregungsfrequenzen bestimmen.
Die Funktion können wir später mit gemessenen Werten vergelichen.
Manfred

Wir werden neben dem Sägezahn aber wohl oft bei beschleunigten Bewegungen mit quadratischen Funktionen konfrontiert sein.
Oder nehmen wir den Sägezahn als Näherung davon und lassen es gut sein ?
mfg robert
Wer glaubt zu wissen, muß wissen, er glaubt.
Ich bin eigentlich froh wenn ich eine solche Geschwindigkeit wie in 30ms die 6cm und ein bisschen mehr einigermaßen kontinuierlich zusammenbekomme. Das sind ca. 2m/s Annäherung an ein Hindernis (oder auch sonst Abstandsänderung bei der Drehung).
Zum Test der noch schnelleren Sprünge haben wir dann ja auch noch den Wechsel von einem Rotorblatt auf das nächste. Der sollte dann auch noch
analysiert werden.
Manfred
Nicht lachen !
Wenn du (sehr viel) Phantasie hast, verstehst du vielleicht, was mit der Zeichnung gemeint ist. Das soll eine Draufsicht sein. Links der GP2. die sensationelle Kurve rechts davon erzeugt bei Drehung für den GP2 einen Sägezahn. Diese Drehung ließe sich besser kontrollieren als ein Ventilator mit doch ungünstig geformten Blättern.
mfg robert
Wer glaubt zu wissen, muß wissen, er glaubt.
Ich lache ja gar nicht, ich habe ja einige Zeit nach etwas geeignetem gesucht.
Sag bescheid, wenn Du mit dem Auswuchten fertig bist.
Manfred
Anregung mit weiteren Testfrequenzen
Es war noch offen, welche Frequenz am Sensorausgang erscheint, wenn die anregende Sägezahnfunktion eine Frequenz von 31,25Hz hat. Die Signalamplitude ist dann zwar null, da jedes mal über eine ganze Periode des Signals gemittelt wird, aber in der Umgebung wird das Signal mit der Frequenz erscheinen.
Bei einer Abtastung die jeweils nach 8ms Pause erfolgt wird ein um 8ms verschobenes Stück des Signals abgetastet. Das ist ein Viertel der Periodendauer also 90°. Ändert sich die Phase des Signals mit der Abtastfrequenz von 25Hz um jeweils 90° dann ergibt sich eine Frequenz die ¼ so groß ist wie die Frequenz bei der sich die Phase mit 25Hz um jeweils 360° ändert.
Es ergibt sich somit unmittelbar 6,25Hz. Siehe Bild 3 b
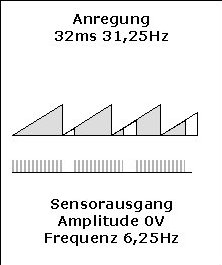
Bild 3b Anregung mit 31,25 Hz
Es werden sich bei der Abtastung, (Multiplikation oder Faltung) eines Signals durch eine anderes immer die Frequenzdifferenzen und -Summen ergeben, was bei komplexen Signalen mit vielen Frequenzanteilen sehr vielfältig werden kann. Speziell die tiefen Frequenzen kann man dabei oft noch leicht erkennen. Hier sind es 31,25 Hz 25 Hz = 6,25 Hz.
Betrachtet man mit der Erkenntnis noch einmal Bild 1 dann erkennt man, dass die Fälle auftreten. So muss die Phasenumkehr rechts bei 8s bei der Anregung mit 25Hz sein, denn in ihrer Umgebung ist auch die Amplitude 0,16V und in der Mitte des Bildes bei 4,3s gibt es eine phasenunabhängige Nullstelle. Die Ausgangsfrequenz ist dort nicht gut erkennbar. Allerdings sind rechts davon, bei 5s bis 7,6s einige Perioden eines Rampenförmigen Signals zu erkennen.
Bei genauerer Betrachtung erkennt man, dass die erste Periode etwa 0,25s dauert die folgenden haben Dauern von 0,3s; 0,4s; 0,5s; 0,8s das sind 4Hz bis 1,25Hz Ausgangsfrequenz und damit 29Hz bis 26,25Hz Anregungsfrequenz.
Der Ventilator wird also über das Oszillogramm in Bild 1 von links nach rechts kontinuierlich verlangsamt.
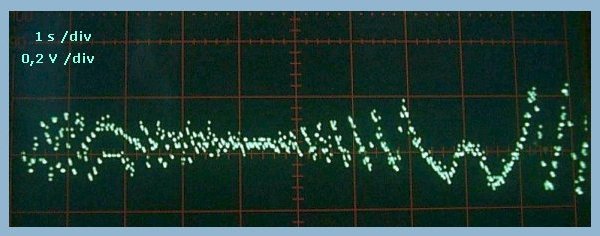
Bild 1
Phasenverlauf:
Da der Sensor vor dem Ventilator steht, ist bei langsamer Drehung die Rampenfunktion nach rechts ansteigend. Sie wäre auch nach rechts ansteigend für Anregungsfrequenzen, die schneller laufen als bei Synchronisation mit der Abtastung, also links von der Phasenumkehr bei 8s (oder 25Hz). Die Gegenläufigkeit der Phase (nach rechts abfallend) in diesem Bereich ergibt sich aus einer weiteren Phasenumkehr die durch eine Mittelung über mehr als 50% der Abtastperiode bedingt ist.
Damit ist die Funktion in Bild 1 schon weitgehend beschrieben und verifiziert. Es fehlt dann noch die regelmäßige Struktur auf der linken Seite bei 1,7s.
Manfred
Solche "parallel" Kurven kannst du kriegen, wenn das f-verhältnis in etwa ungeradzahlig ist
Edit: Ich überleg' gerade, ob man irgendwie lissajus-figuren zusammenbringen könnte.
mfg robert
Wer glaubt zu wissen, muß wissen, er glaubt.
Etwas OT: Ich hab noch keinen Sharp geschlachtet. Was für ein Sensor ist das genau, mit dem der Kerl den Einfallswikel mißt ?
mfg robert
Wer glaubt zu wissen, muß wissen, er glaubt.
PSD Position sensitive device.
Wir haben Fotos von geöffneten Sharps*) und ich hoffe ich finde auch noch die Beschreibung zum PSD**), (die ganz nett war).
Manfred
*) https://www.roboternetz.de/phpBB2/ze...?p=56459#56459

Ah, danke. Ich hab ein PDF gefunden.
http://herkules.oulu.fi/isbn95142578...9514257804.pdf
Wenn's so ist, geht's um die LEP (lateral effect photodiode) und damit ist das Prinzip verständlich.
Warum fragt man sowas blödes: Wir sind im Thread davon ausgegangen, daß der GP einen Mittelwert über 32 Messungen bildet. Jetzt wollt ich das mal hinterfragen.
mfg robert
Wer glaubt zu wissen, muß wissen, er glaubt.


Lesezeichen