-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

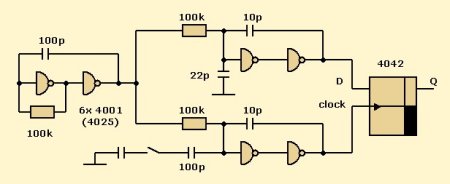
Beim Durchgang der vorhandenen MOS Bausteine habe ich keinen 3-state gesehen, deshalb habe ich eine Lösung mit Delay ausprobiert. Gegenüber der Lösung mit 4046 werden ein paar mehr Komponenten benötigt.
Ich hoffe die Schaltung ist leicht nachvollziehbar.
Ein Oszillator mit ca. 50kHz wirkt auf zwei Verzögerungsschaltungen die gleich aufgebaut sind. Ein Tiefpass mit 100kOhm 22pF wird verglichen mit einem Tiefpass aus 100kOhm mit der Kapazität der Platte und der Platte mit der berührenden Person. Die Spannung am Tiefpass wird von jeweils einem Komparator mit dynamischer Mitkopplung ausgewertet.
Der Wert 22pF wurde in der Messschaltung als Wert mit dem besten Störabstand ermittelt. Gleicher Verzögerungsabstand zu Berührung auf der einen und Nichtberührung auf der anderen Seite.
Die beiden Flanken werden am Latch verglichen und es ergibt sich ein konstanter Pegel je nachdem welcher Wechsel zuerst eintritt. Die aktive Flanke ist am 4042 über Zusatzeingang frei wählbar, beliebig aber konstant.
Manfred
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen