-

-
Erfahrener Benutzer
Roboter-Spezialist

2x Mosfet Halb-H-Brücke -> H-Brücke --> Leerlaufmomente beim PWM?!?
Hallo,
ich bastle gerade mit 2 Halb-H-Brücken-Bausteinen rum:
IRF 7389
Mit 2 solcher Bausteine kann man ja dann eine vollwertige H-Brücke bauen:
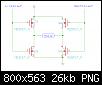
Soweit, sogut...
Um den Motor auszuschalten müssen beide Leitungen (Rechts-/Linkslauf) den gleichen Pegel haben, dann liegt an beiden Polen des Motors entweder +5V oder GND an.
Und da liegt auch schon das Problem:
PWM besteht ja daraus den Motor ganz schnell aus- und anzuschalten, so dass sich eine gleichmäßige, regelbare Geschwindigkeit ergibt.
Wenn z.B. beim PWM immer der Rechtslauf kurz gesetzt wird wird der Motor während dieser Phase angetrieben. Dann wird der Motor kurz ausgeschaltet, während dieser Zeit läuft er mit dem Schwung der Rotierenden Achse weiter, dann wieder kurz angetrieben usw...
So, in den ausgeschaltet-sein-Phasen des PWMs liegen aber beide Pole des Motors entweder an +5V oder GND. Sie sind also miteinander verbunden. Auf der Achse sind Spulen mit den beiden Polen verbunden. Um die Spulen befinden sich Magnete. Die Achse dreht sich -> Spannung wird in die Spulen induziert -> Spannung liegt an den 2 Polen des Motors an (Generator) -> Spannung wird kurzgeschlossen -> Motor wird gebremst
--->
1. Motor beschläunigen
2. Motor bremsen
3. Motor beschläunigen
4. Motor bremsen
5. Motor beschläunigen
usw.
Ziemlich ineffizient...
Ist da irgendwo ein Denkfehler? (hoffentlich...) 
Sonst müsste ich ja (damit ich quasi überkreuzt die Mosfets verbinden kann) jeweils die Eingänge der P- oder N-Mosfets mit einem Logikgatter invertieren, damit ich sie so ansteuern kann wie es meines Wissens bei Transistoren gemacht wird. Außerdem ist dann kein Kurzschlussschutz mehr da.
Bitte sagt mir dass da irgendwo ein Fehler drin ist und der Motor nicht ständig beschläunigt und gebremst wird, sonder immer nur kurz beschläunigt und sonst nix
Gruß
-schumi-
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln








 Zitieren
Zitieren
Lesezeichen